#아두이노 #4w #4륜 #자동차 #조립 #보조배터리 #L298N #4륜 #4W #RC카 #자동차 #아두이노 #자동주행 #HC06 #블루투스 #블루투스 #조이스틱 #조이스틱
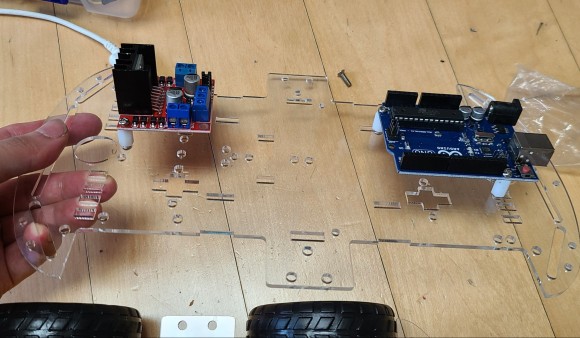
오늘 막 주문한 4W frame이 도착해서 조립을 시작할 https://www.devicemart.co.kr/goods/view?no=13274554WD 스마트 주행 로봇 프레임 세트 입니다. 아두이노를 활용한 다양한 응용이 가능합니다.「www.devicemart.co.kr 모터에 전선이 연결되어 있지 않고, 키트가 아니기 때문에 아두이노나 모터 드라이버의 위치설정이 어려웠다.1. 모터 전선 연결
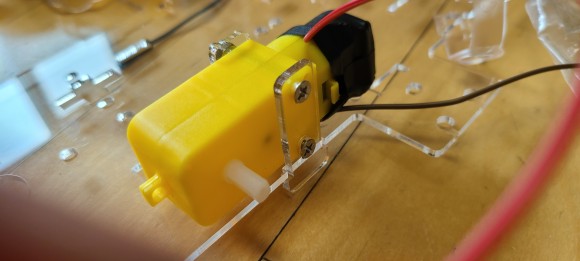
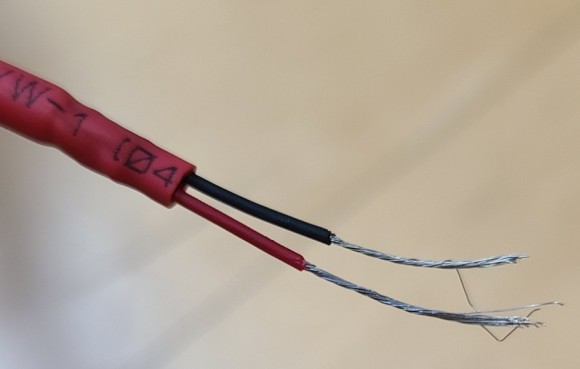
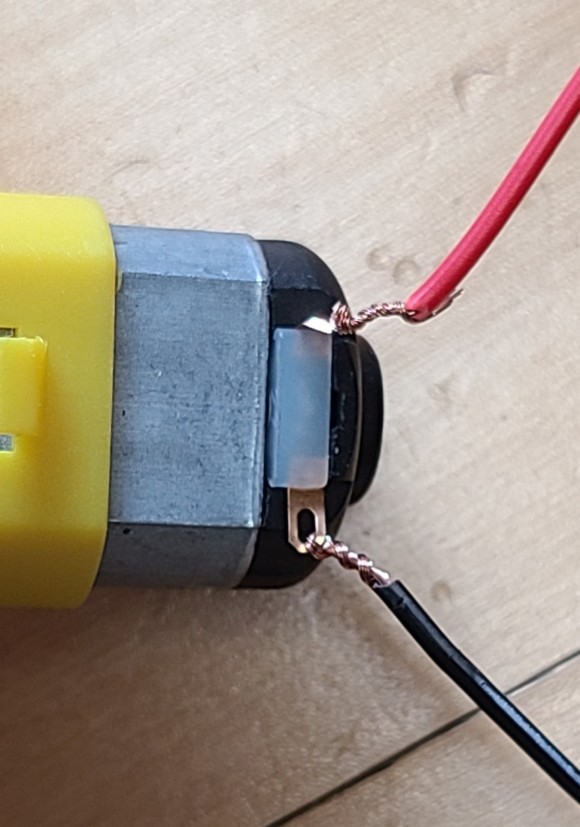
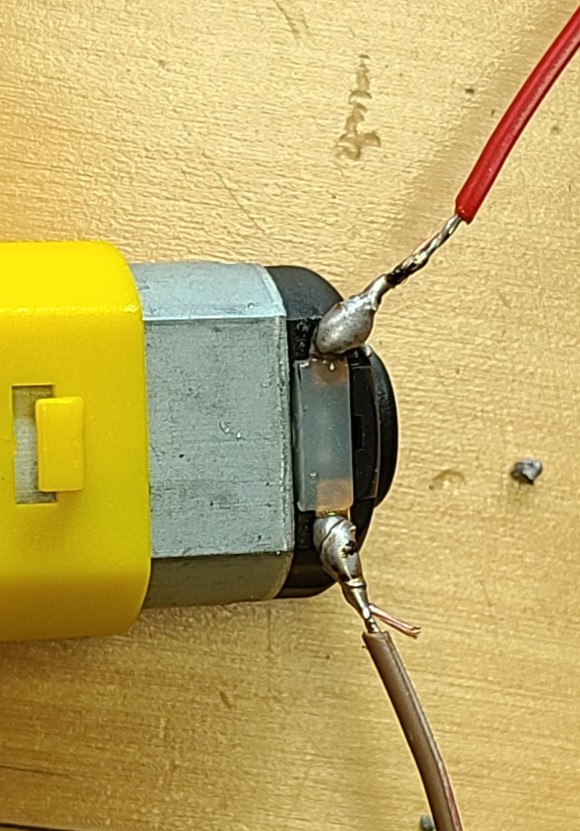
캡벗기기 > 전선연결 > 쪽찍기 > 절연테이프나 수축케이블로 감기 > 캡붙이 수업을 하다보면 모터가 잘 돌지 않을 때 대부분 납땜불량이다.각 모터 전원선의 색깔과 방향은 통일돼야 나중에 조립할 때 혼선이 생긴다.
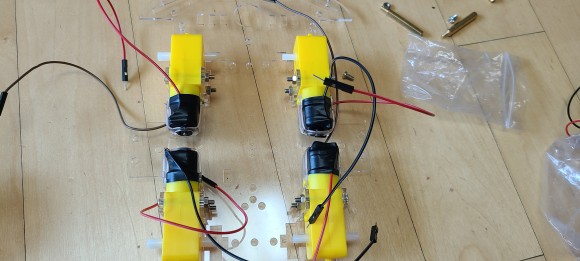
2. 보드와 모터 연결
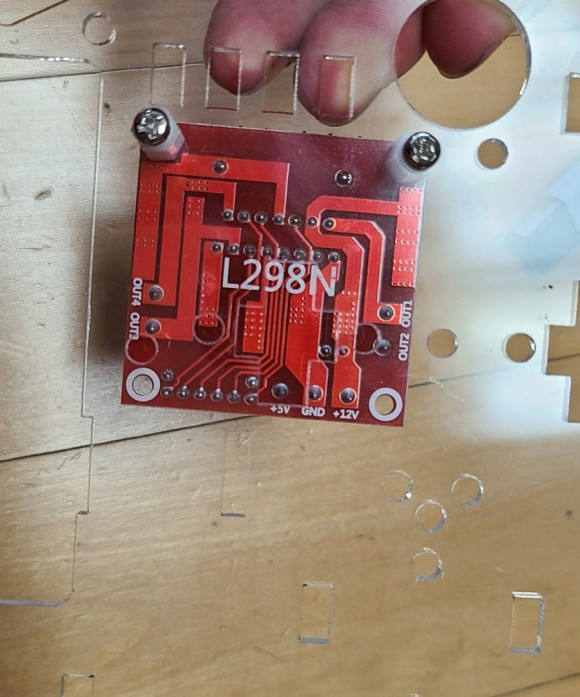
위 프레임을 씌우기 전에 보드 작업을 해야 한다.조립하였으나 또 해체하고 말았다.프레임 세트에는 나사와 볼트가 여기까지다. 게다가 낫트가 4개나 부족했다–. 수업때는 미리 주문해 두지 않으면.
4. 아두이노와 모터드라이브를 연결하는



두 자리를 잡기가 어려웠다. 키트를 사야 하는 이유랄까, 4륜구동이라 프레임의 크기가 커서 복잡하지 않다.
5. 회로구성 디바이스마트 블로그를 활용한 https://devicemart.blogspot.com/2019/07/l298n.html 전기/전자부품, 로봇/기계부품, 코딩교육 국내 1위 쇼핑몰 디바이스마트 공식블로그입니다.devicemart.blogspot.com 상의 예제에서 enable pin을 이용한 코드가 동작하지 않았기 때문에 enable을 제외하고 high/low에서만 제어했다.
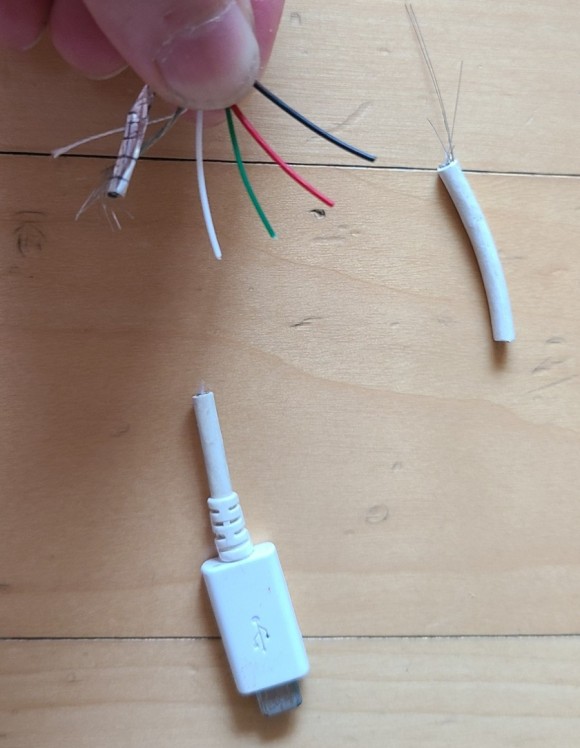
3. 전원연결 rc카에서 가장 신경 쓰이는 부분이 전원이다.배터리를 많이 먹어 조금 작동시키는 것만으로 속도에 영향을 준다.특히 자율주행에서는 연습을 몇 번 하면 회전각이 바뀌어 상태를 일관성 있게 유지하기가 어렵다.그래서 보조배터리를 활용해 보기로 했다.usb케이블을 분리하고 전원선만 분리했다.

6. 동작
다만 보조배터리 출력 5v로 4개의 모터와 아두이노를 구동하기에는 부족했다.아두이는 9V 배터리로 이동 중…수업장에 있는 리트위온 충전 배터리로 교체해 속도가 빠른 것에 사용해야 한다.
내일 할 일 1.3D 출력 및 Frame 출력 맡겨둔 것 확인 2. 블루투스 연결해서 조정기로 조정해보기