출원번호 10-2019-7027908 출원일 2018.02.22 출원한 테슬라, 잉크. 공개/등록번호(일자) 10-2089262(2020.03.17) 발명의 명칭 자동화된 턴시그널링을 위한 차량기술, 자동차가 스스로 차선을 바꾸는 ‘차선변경’ 기능은 테슬라가 2015년도에 오토 파일럿에서 선보였다(그림1). 2016년, 2018년도에 각각 메스세데스 벤츠나 BMW등이 양산차에 이 기능을 도입했다. 해외의 자동차 메이커가 이미 적용중의 「차선 변경」기능을 국내 자동차 메이커도 도입하기 위해서 서두르고 있다(그림 2). 국내 자동차업체가 개발 중인 차로변경 기술은 고속도로에서 속도조절, 앞차와 거리조절 및 차선유지 등의 기능을 포함하고 있다. 여기에 카메라, 후면과 측면 레이더를 이용해 옆 차선 차량을 감지해 차선 변경이 가능하도록 하고 전방과 후궁에 레이더를 장착해 차선 변경과 갑자기 끼어들 차량에 대응할 수 있도록 한다.
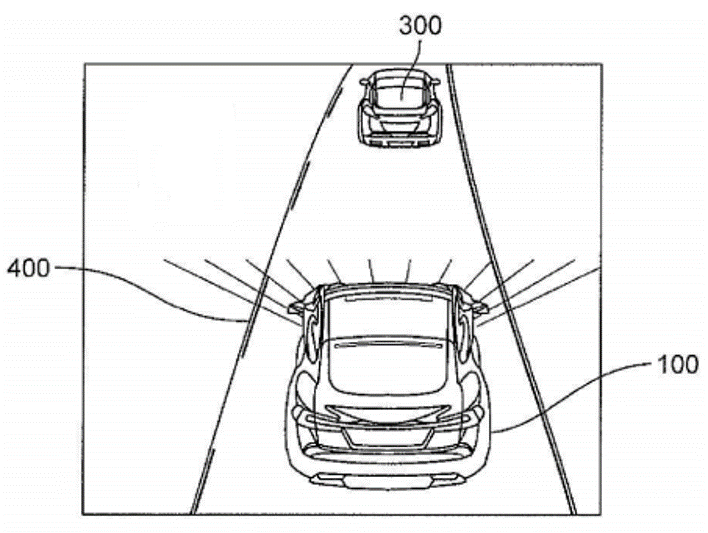
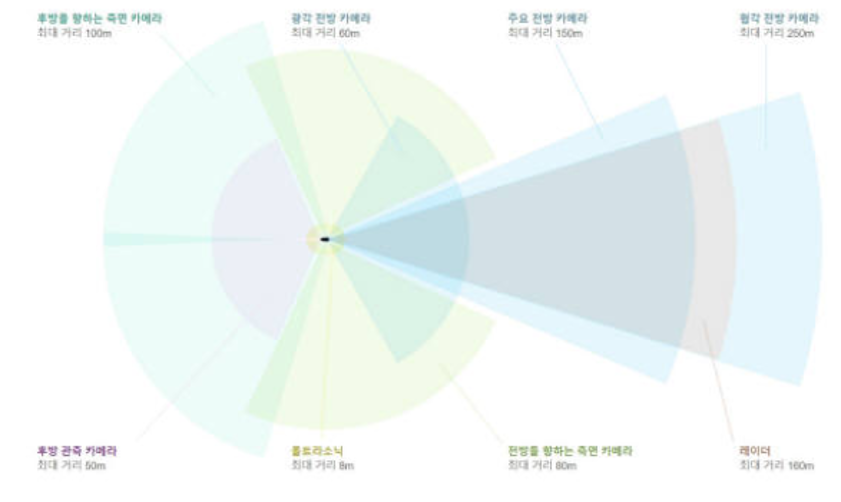
그림1. 테슬라의 오토파일럿 감지범위
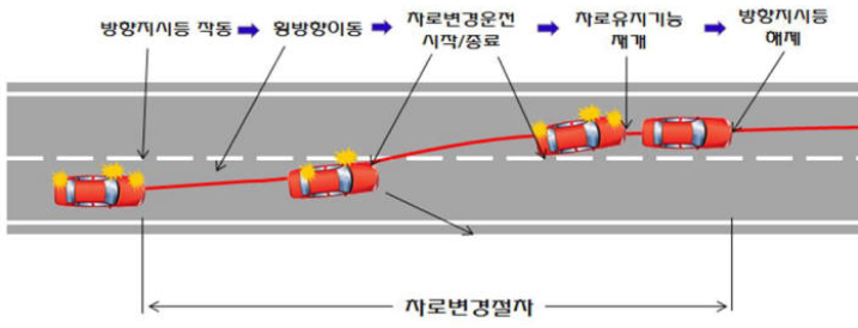
그림2차선변경절차자동차가 턴을 하고 차선을 전환하면 차량이 주행방향을 변경할 수 있다는 사실을 턴시그널 광원으로 보행자와 다른 차량의 운전자에게 시각적으로 통지한다. 자동차의 운전자가 주행방향을 변경시키기 전에 턴시그널 광원을 활성화하는 것을 종종 등한시하는 경우가 발생한다. 이 상황은 고속도로에서 위험하고, 차량 사고의 원인이 된다.본 특허는 차량을 안전하게 차선을 변경하기 위해 현재 차선의 위치, 변경하는 시점 및 변경 후의 위치를 위한 자동화된 시그널링에 관한 기술을 포함하고 있다. 단계(400)는 입력 블록(402), 복수의 결정 블록(410, 412, 414), 동작 블록(416) 및 비동작 또는 동작 블록(418)을 포함한다(그림3). 입력블록(402)은 제1입력(404), 제2입력(406) 및 제3입력(408)으로 구성된다. 제1입력(404)은 제1데이터 소스로서 카메라로부터 하나 이상의 데이터 스트림을 통해서 데이터를 수신한다. 단계(410)에서 제1입력(404)에 근거해, 차량이 도로상에서 차선 라인을 가로지르려고 하고 있는지 여부를 결정한다(그림 4). 제2입력(406)은 제2데이터 소스로서 조향 각도 센서로부터 데이터 스트림에 의해 데이터를 수신한다. 단계(412)는 제2입력(406)에 따라 차량의 운전자가 조향동작을 적용하고 있는지 여부를 결정한다. 제3입력(408)은, 제3 데이터 소스로서 하나 이상의 초음파 센서로부터 데이터 스트림을 통해서 데이터를 수신한다. 단계(414)에서는, 제3 입력(408)의 정보를 기본으로, 미리 정해진 거리내에 특정 방향 및 위치내에 다른 차량이 존재하는지를 결정한다(그림 5). 단계(416)는 여러 조건(차선라인을 가로지르기 직전, 차선라인을 가로지를 때, 가로지른 직후)으로 프로세서(104)가 턴시그널 소스(118)를 활성화시킬 수 있다(그림6). 단계(418)는 프로세서(104)의 턴시그널 소스(118)를 활성화시키지 않는다.
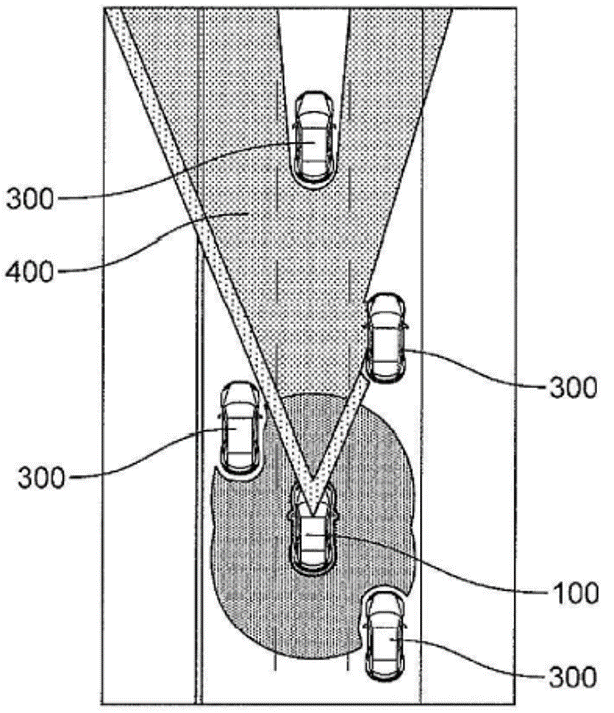
그림3. 자동화된 시그널 활동 성화
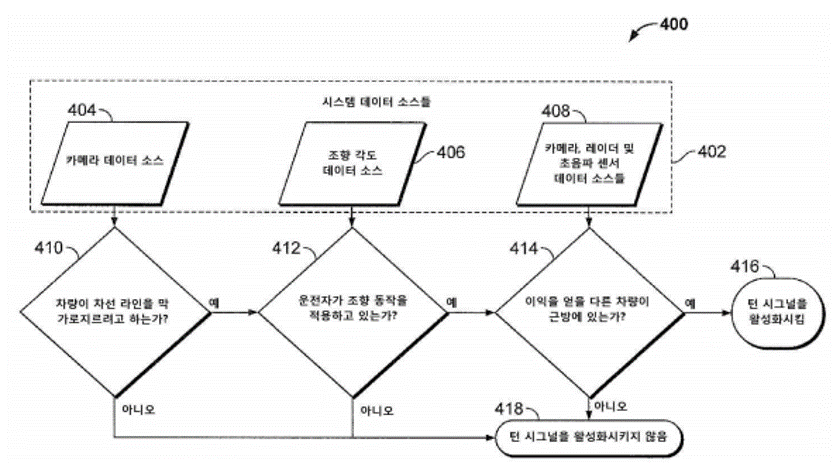
그림4. 차선선을 가로지르는지 여부를 결정

그림 5. 특정 방향 및 위치 내 다른 차량의 존재 여부
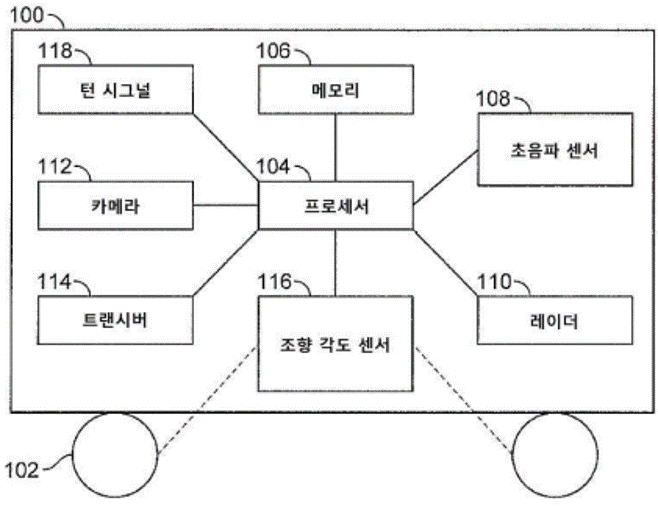
그림6. 차량의 자동 차선변경을 위한 시스템 미래에는 고속도로나 자동차전용도로에서 앞차, 옆차와의 거리를 유지하며 주행할 것이며 곡선로나 나들목에서도 원활한 코너링을 통해 차선변경까지 스스로 하는 차량이 보급될 것이다. 양산차에 적용되는 자율주행 기술은 기업의 수입에 직접 영향을 주고 소비자에게는 실생활에 큰 변화를 가져온다는 점에서 의미가 있다. 테슬라는 자동차 시장의 수익성을 파악하고 자율주행 기술 개발에 박차를 가하고 있으며 이는 미래 수익으로 이어질 것으로 보인다.
특허법인 ECM변리사 김시우 [email protected] 02-568-2670
서울특별시 강남구 테헤란로70길 13 3층 1호